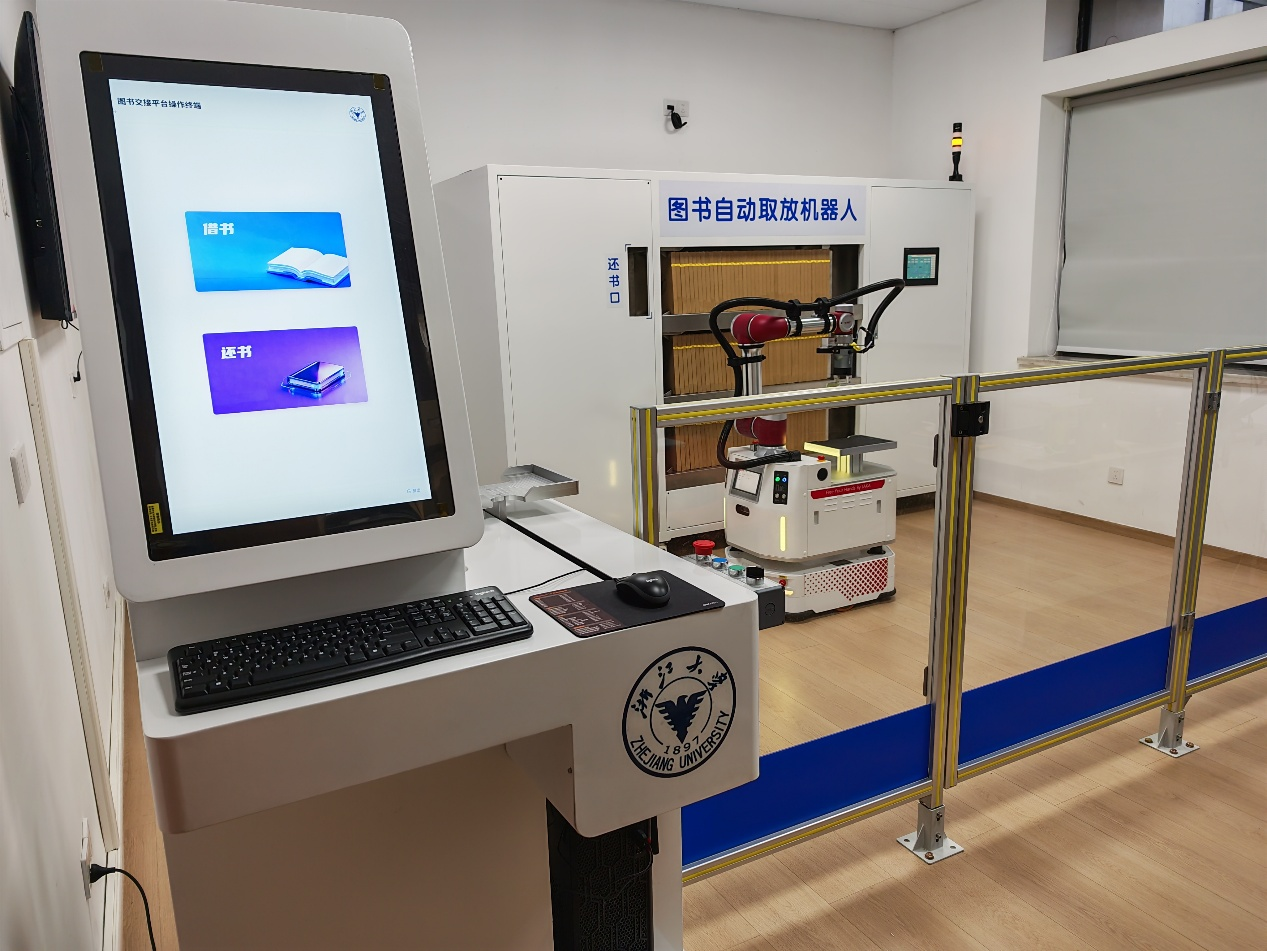
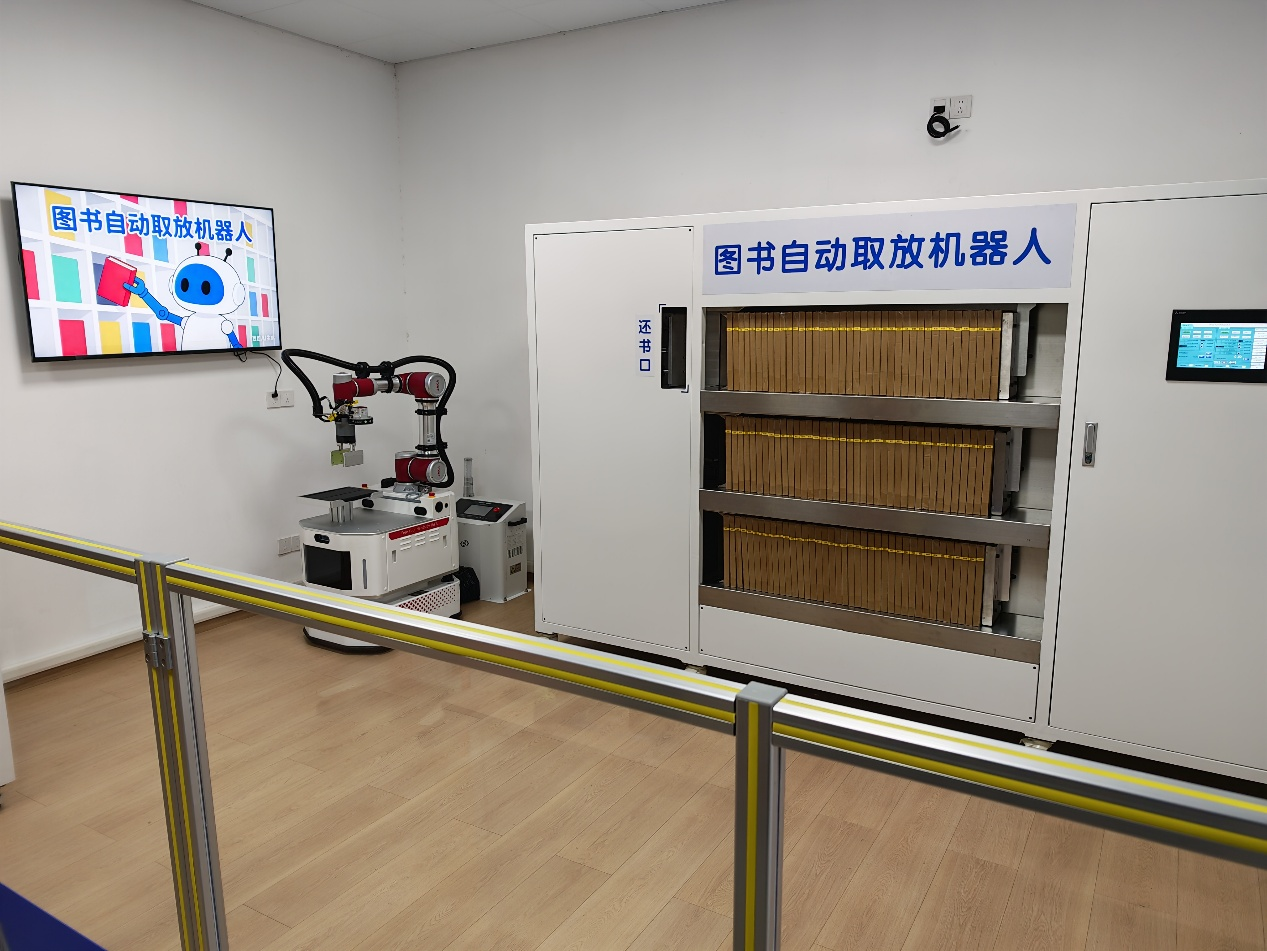
1、设备名称:图书自动取放机器人
2、实验内容:该实验平台可以开展移动机器人技术(激光SLAM导航、路径规划、自动充电)、机器视觉与感知(视觉定位、手眼标定、图书识别)、机器人运动控制(六轴机械臂运动学/动力学分析、抓取规划、视觉伺服)、自动化控制系统(PLC编程、CC-Link IE Field Basic/TSN工业总线通信、伺服运动控制)、软件与AI应用(基于NLP的智能对话系统开发、知识图谱构建、数据库管理、人机界面设计)、系统集成与物联网(多模块协同控制、无线通信、RFID技术应用、分布式调度算法)以及智能系统运维(故障诊断、精度标定、性能优化)等实验教学,贯穿从底层硬件驱动到上层智能决策的完整技术链条。