建设机器人伺服系统实验平台2

建设机器人伺服系统实验平台2

建设机器人伺服系统实验平台
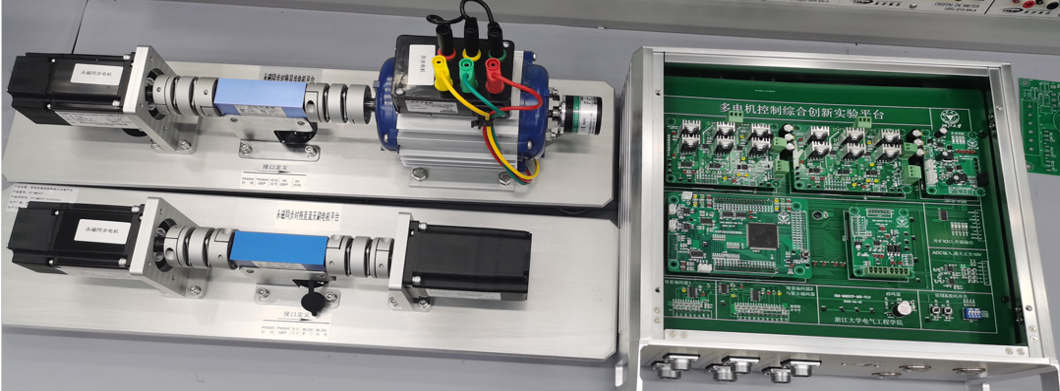
多电机驱动控制综合实验平台
多电机驱动控制综合实验平台
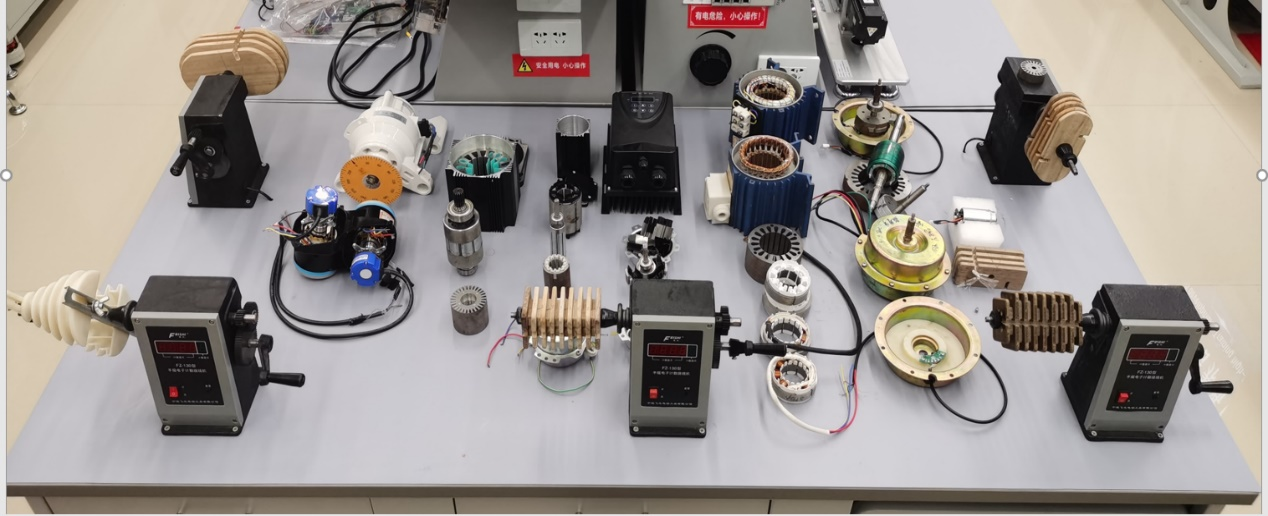
电机实训平台

工业机器人装配生产线教学实践工业机器人装配生产线教学实践系统
工业机器人装配生产线教学实践工业机器人装配生产线教学实践系统
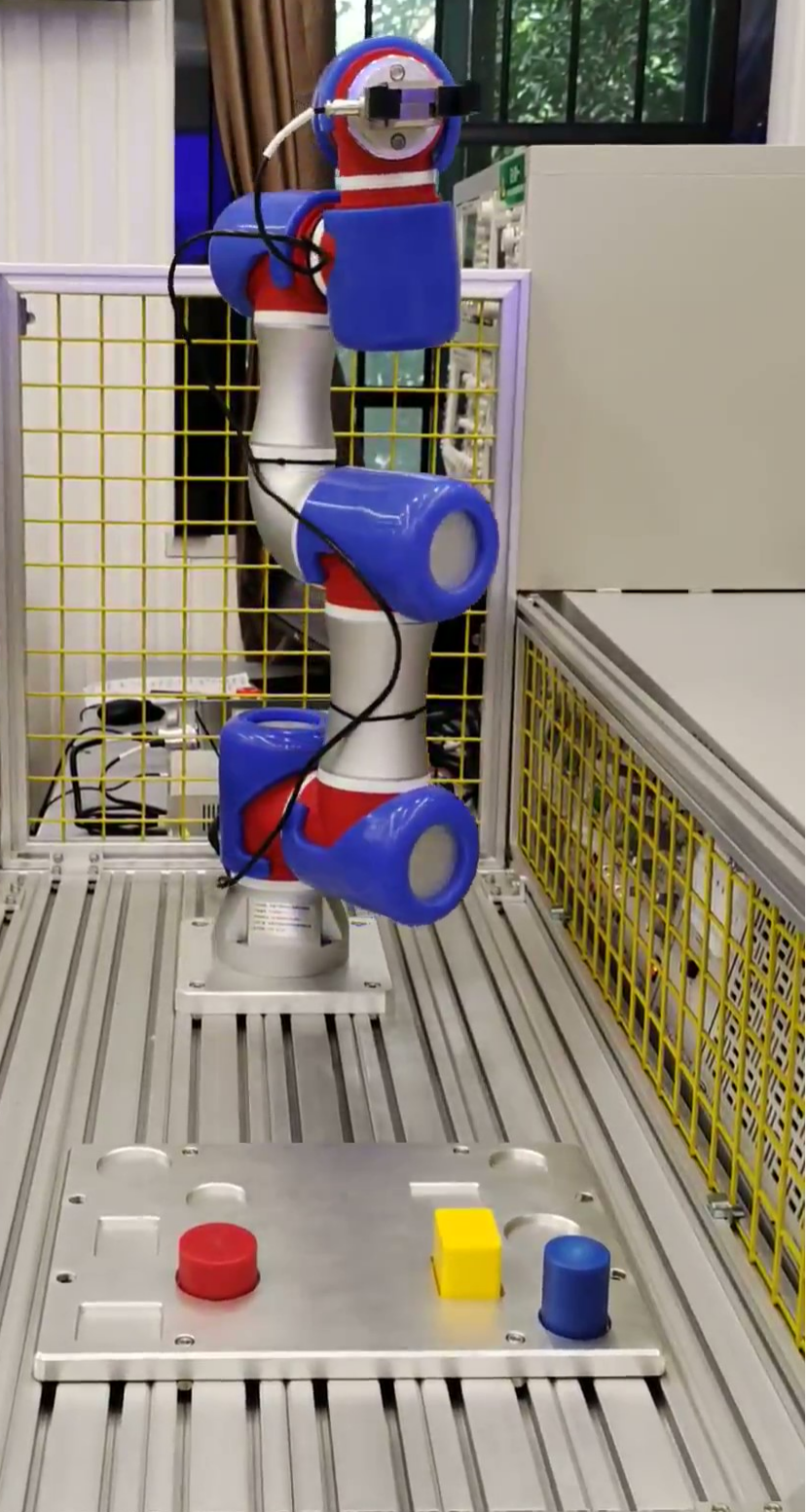
开源六轴机械臂
开源六轴机械臂

开源四轴工匠机器人
开源四轴工匠机器人

六轴拆装机械臂
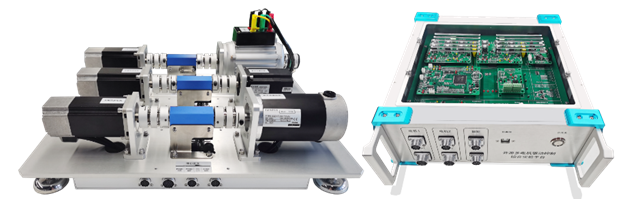
研究型多电机控制实验平台
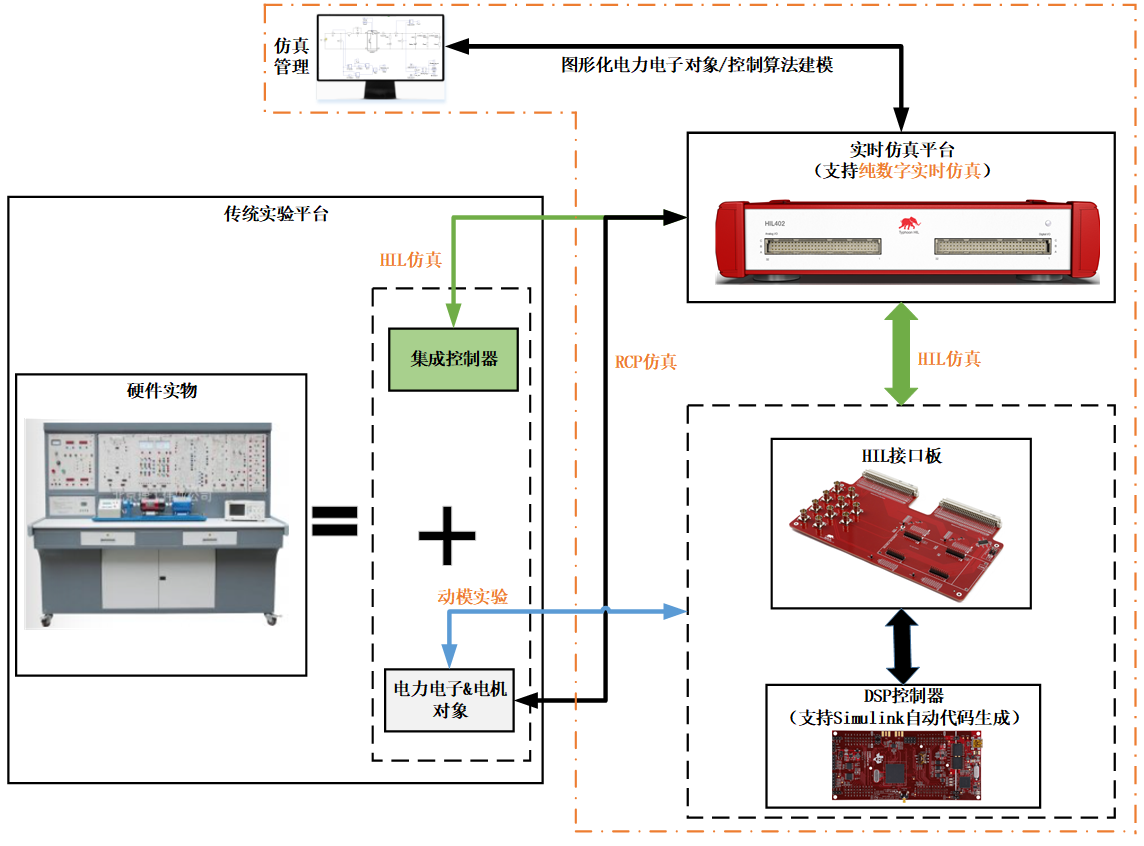
电气工程半实物仿真实验平台

电力电子与运动控制综合创新实验平台

机器人力觉感知与反馈套件
机器人力觉感知与反馈套件
